1.9 KiB
Spectra
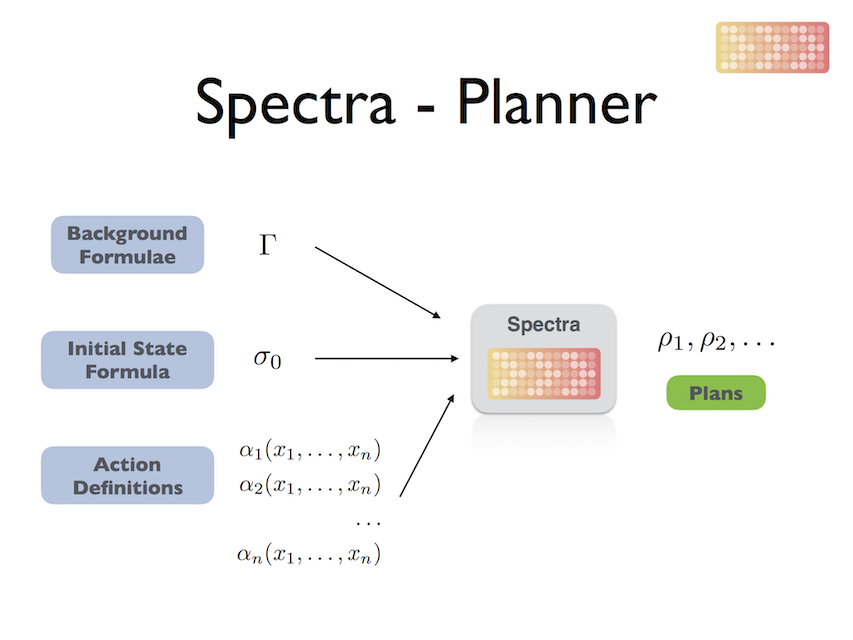
Spectra is a general purpose planning system. It extends STRIPS-style planning by allowing arbitray first-order formulae for state descriptions and background knowledge rather than just predicates. This allows, for instance, handling domains with infinite or unbounded objects elegantly (among other things).
- Existing Planners are propositional
- Drawbacks:
- Expressivity: Cannot express arbitrary constraints. “At every step make sure that no two blocks on the table have same color”
- Domain Size: Scaling to large domains of arbitrary sizes poses difficulty.
Architecture
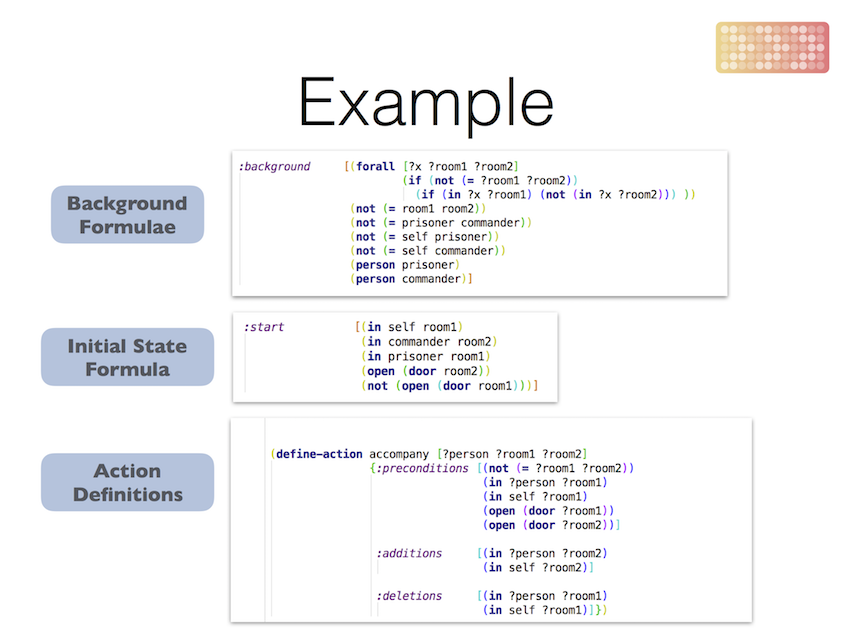
Example
Scaling Up
Two approaches:
-
Procedural Attachments: Special purpose procedural code that can bypass strict formal reasoning.
-
μ-methods: Written in denotational proof language. Preserves soundness by letting us write down commonly used patterns of reasoning (a bit unwieldy integration now than the first approach)
;; (removeFrom ?x ?y) => "Remove ?x from ?y"
;; (placeInside ?x ?y) ==> "Place ?x inside ?y"
(define-method planMethod [?b ?c ?d]
{:goal [(In ?b ?c) (In ?c ?d)]
:while [(In ?b ?d) (Empty ?c)
(< (size ?c) (size ?d))
(< (size ?b) (size ?c))]
:actions [(removeFrom ?b ?d) (placeInside ?b ?c) (placeInside ?c ?d)]})
Roughly, a method has conditions that the goal and background + start state should satisfy. If the conditions are satisfied, a plan template is generated (note the variables). The planner then verifies if the plan template works, if so it outputs the plan.